
海陆空智能无人系统安全巡查平台
课题名称选题学生指导教师基于连续体机构的跨平台对接充电装置设计马殿翱康荣杰密集行人目标检测算法研究周 迪张 蕾基于模型预测控制的多车协同避障控制策略研究苑保坤左志强无人机在突发公共事件的应急救援中应用研究白 鹏董永庆基于红外热成像的目标识别与跟踪算法研究齐 妙胡浩丰无人驾驶汽车选定道路跟踪与自主避障控制研究秦子奇杨洪玖稀疏推理加速器设计武嘉闻刘 强基于深度学习的烟火检测方法研究阚 唯罗卿莉无人集群巡...
无人驾驶汽车交叉平台、未来智能机器与系统平台
项目负责人
谢辉
课题名称 |
选题学生 |
指导教师 |
基于连续体机构的跨平台对接充电装置设计 |
马殿翱 |
康荣杰 |
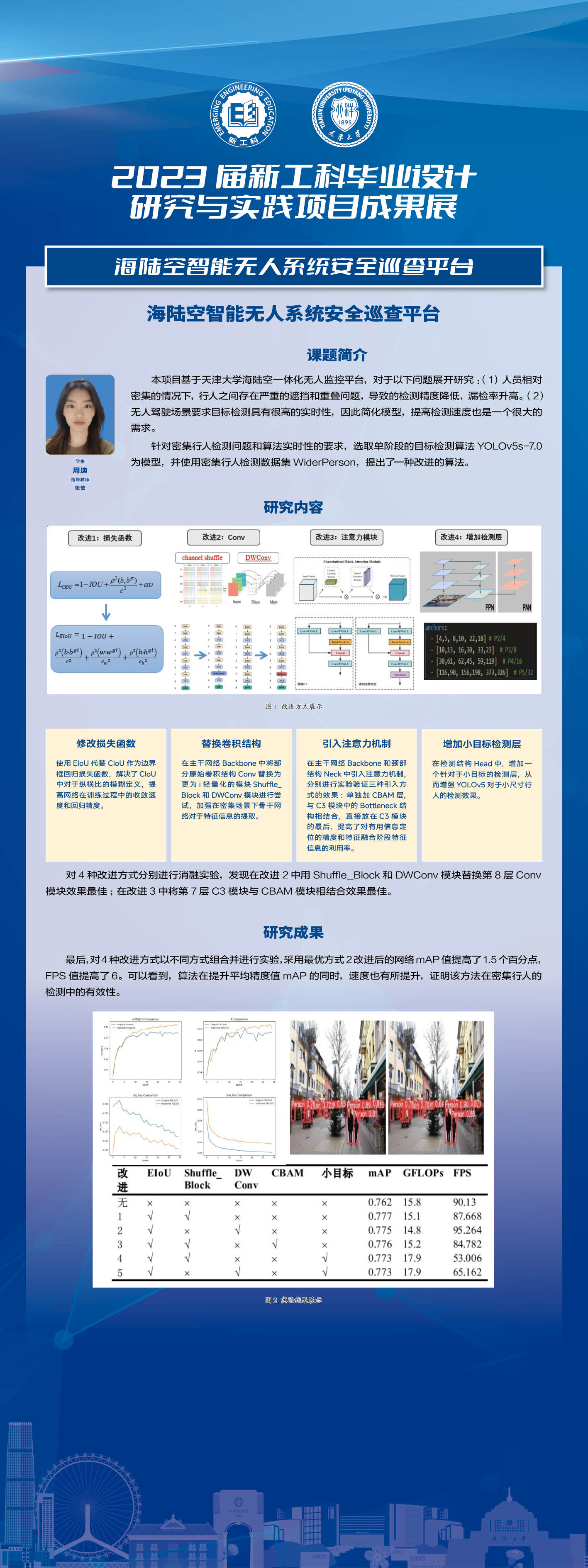
密集行人目标检测算法研究 |
周 迪 |
张 蕾 |
基于模型预测控制的多车协同避障控制策略研究 |
苑保坤 |
左志强 |
无人机在突发公共事件的应急救援中应用研究 |
白 鹏 |
董永庆 |
基于红外热成像的目标识别与跟踪算法研究 |
齐 妙 |
胡浩丰 |
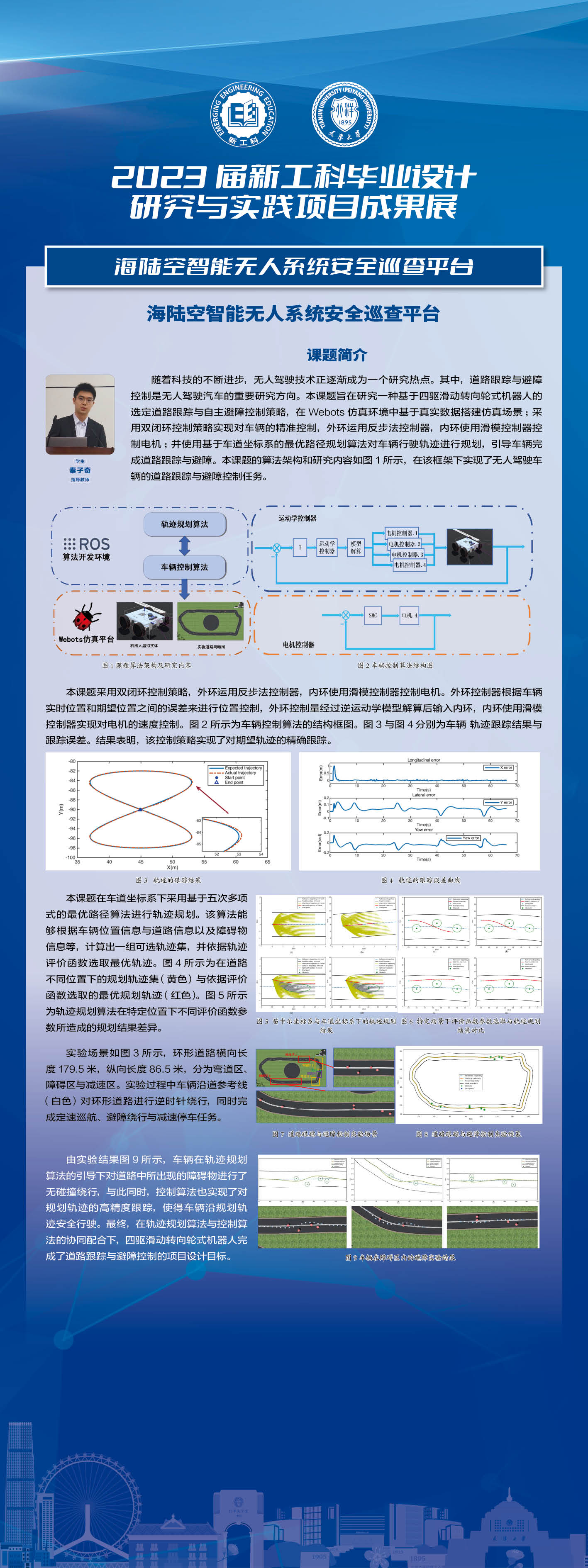
无人驾驶汽车选定道路跟踪与自主避障控制研究 |
秦子奇 |
杨洪玖 |
稀疏推理加速器设计 |
武嘉闻 |
刘 强 |
基于深度学习的烟火检测方法研究 |
阚 唯 |
罗卿莉 |
无人集群巡查过程可视化及交互软件设计 |
刘晗曦 |
牛志彬 |
无人车/船/机集群能源综合优化方案算法 |
沈 攀 |
谢 辉 |
基于因果推断的开放环境鲁棒目标识别研究 |
杜 昊 |
刘若楠 |
基于Transformers的异常行为检测与跟踪方法研究 |
师 瑞 |
罗卿莉 |
动态环境下稳定目标识别研究 |
李盈盈 |
刘若楠 |
目标检测、分割与跟踪一体化技术 |
朱文祺 |
曹家乐 |
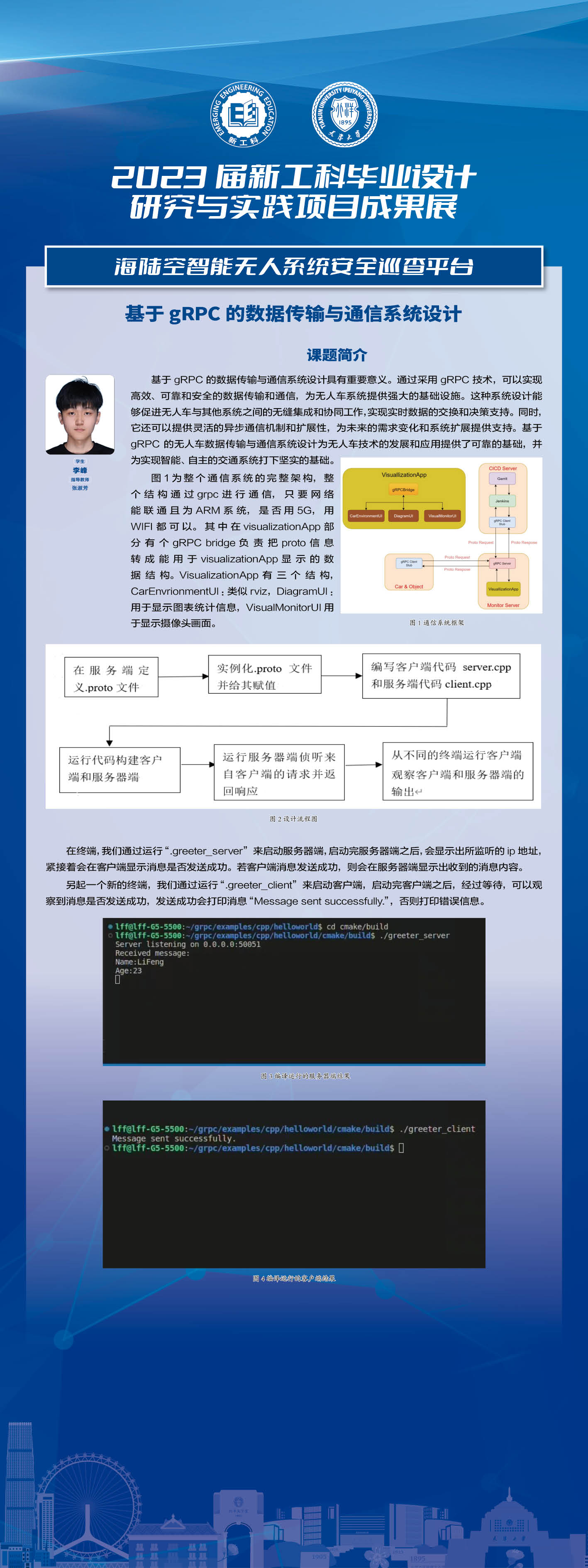
基于无人车的地面信息收集与传送系统设计 |
李 峰 |
张淑芳 |
无人艇水下目标识别装置设计与应用研究 |
嘉 豪 |
高 邈 |
海陆空智能无人系统项目知识管理体系与管理平台研发 |
王舒雯 |
李 罡 |
面向多机器人协同巡查的动态调度方法研究 |
胡书琴 |
靳荔成 |
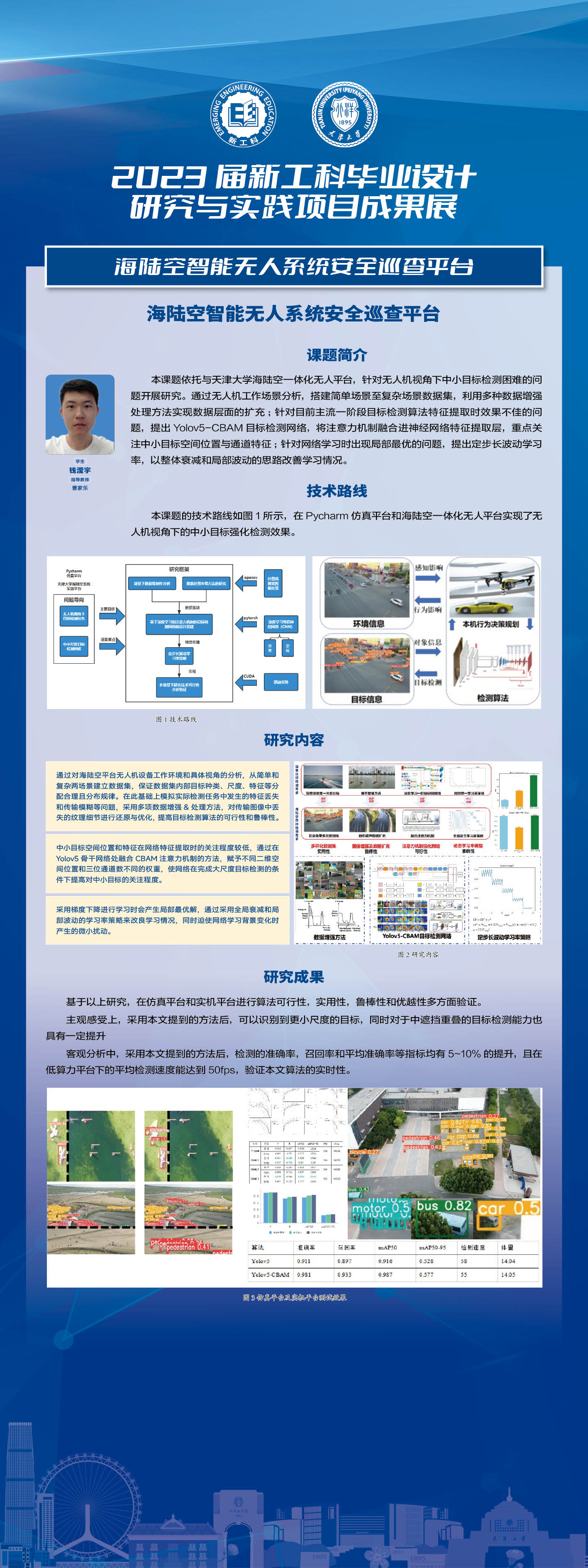
面向无人机平台的水面小目标检测技术 |
钱滢宇 |
曹家乐 |
基于OpenGL的语义地图可视化研究 |
姜 涛 |
张淑芳 |
基于无人船的水面信息收集与传送系统设计 |
袁怡硕 |
冯士伦 |
基于前方坡度预见感知的无人车节能算法研究 |
陈新页 |
宋 康 |
四旋翼无人机时变轨迹跟踪与鲁棒控制器设计研究 |
孙绍鹏 |
杨洪玖 |
目标识别的分布外泛化问题研究 |
阎昱铖 |
刘若楠 |
水面无人装备自主充电系统设计 |
冉渝茹 |
张安民 |
智能驾驶无人船环形水域路径规划与自主控制研究 |
王 祎 |
杨洪玖 |
信息监测无人艇多采样装置设计研究 |
朗加扎西 |
项忠霞 |
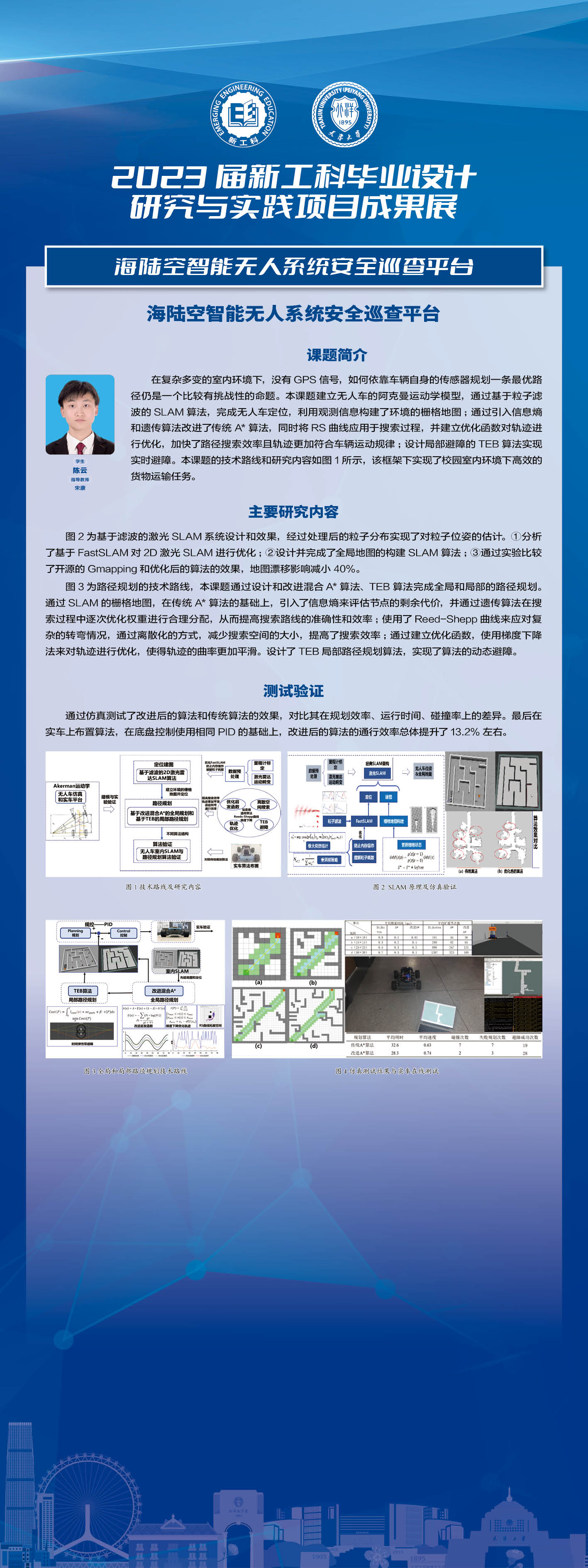
基于SLAM的无人车室内高效导航路径规划算法 |
陈 云 |
宋 康 |
连续体充电机构的对接控制方法 |
靳文龙 |
康荣杰 |
基于时空信息融合的激光雷达点云动态物体分割算法 |
徐渊宇 |
孙学斌 |
分组策略下异构多智能体的路径规划算法研究 |
乔志豪 |
邓英俊 |
基于VINS-FUSION采用EGO-PLANNER框架的自主导航避障无人机 |
王 焱 |
张 蕾 |
无人机与无人船编队控制算法研究 |
曾心怡 |
邓 斌 |